|
| void | DiagnosticCheckNaN () const |
| |
| | TMatrix ()=default |
| |
| | TMatrix (EForceInit) |
| |
| | TMatrix (const TPlane< T > &InX, const TPlane< T > &InY, const TPlane< T > &InZ, const TPlane< T > &InW) |
| |
| | TMatrix (const TVector< T > &InX, const TVector< T > &InY, const TVector< T > &InZ, const TVector< T > &InW) |
| |
| void | SetIdentity () |
| |
| TMatrix< T > | operator* (const TMatrix< T > &Other) const |
| |
| void | operator*= (const TMatrix< T > &Other) |
| |
| TMatrix< T > | operator+ (const TMatrix< T > &Other) const |
| |
| void | operator+= (const TMatrix< T > &Other) |
| |
| TMatrix< T > | operator* (T Other) const |
| |
| void | operator*= (T Other) |
| |
| bool | operator== (const TMatrix< T > &Other) const |
| |
| bool | Equals (const TMatrix< T > &Other, T Tolerance=UE_KINDA_SMALL_NUMBER) const |
| |
| bool | operator!= (const TMatrix< T > &Other) const |
| |
| TVector4< T > | TransformFVector4 (const TVector4< T > &V) const |
| |
| TVector4< T > | TransformPosition (const TVector< T > &V) const |
| |
| TVector< T > | InverseTransformPosition (const TVector< T > &V) const |
| |
| TVector4< T > | TransformVector (const TVector< T > &V) const |
| |
| TVector< T > | InverseTransformVector (const TVector< T > &V) const |
| |
| TMatrix< T > | GetTransposed () const |
| |
| T | Determinant () const |
| |
| T | RotDeterminant () const |
| |
| TMatrix< T > | InverseFast () const |
| |
| TMatrix< T > | Inverse () const |
| |
| TMatrix< T > | TransposeAdjoint () const |
| |
| void | RemoveScaling (T Tolerance=UE_SMALL_NUMBER) |
| |
| TMatrix< T > | GetMatrixWithoutScale (T Tolerance=UE_SMALL_NUMBER) const |
| |
| TVector< T > | ExtractScaling (T Tolerance=UE_SMALL_NUMBER) |
| |
| TVector< T > | GetScaleVector (T Tolerance=UE_SMALL_NUMBER) const |
| |
| TMatrix< T > | RemoveTranslation () const |
| |
| TMatrix< T > | ConcatTranslation (const TVector< T > &Translation) const |
| |
| bool | ContainsNaN () const |
| |
| void | ScaleTranslation (const TVector< T > &Scale3D) |
| |
| T | GetMinimumAxisScale () const |
| |
| T | GetMaximumAxisScale () const |
| |
| TMatrix< T > | ApplyScale (T Scale) const |
| |
| TVector< T > | GetOrigin () const |
| |
| TVector< T > | GetScaledAxis (EAxis::Type Axis) const |
| |
| void | GetScaledAxes (TVector< T > &X, TVector< T > &Y, TVector< T > &Z) const |
| |
| TVector< T > | GetUnitAxis (EAxis::Type Axis) const |
| |
| void | GetUnitAxes (TVector< T > &X, TVector< T > &Y, TVector< T > &Z) const |
| |
| void | SetAxis (int32 i, const TVector< T > &Axis) |
| |
| void | SetOrigin (const TVector< T > &NewOrigin) |
| |
| void | SetAxes (const TVector< T > *Axis0=NULL, const TVector< T > *Axis1=NULL, const TVector< T > *Axis2=NULL, const TVector< T > *Origin=NULL) |
| |
| TVector< T > | GetColumn (int32 i) const |
| |
| void | SetColumn (int32 i, TVector< T > Value) |
| |
| CORE_API UE::Math::TRotator< T > | Rotator () const |
| |
| CORE_API UE::Math::TQuat< T > | ToQuat () const |
| |
| void | To3x4MatrixTranspose (T *Out) const |
| |
| bool | GetFrustumNearPlane (TPlane< T > &OuTPln) const |
| |
| bool | GetFrustumFarPlane (TPlane< T > &OuTPln) const |
| |
| bool | GetFrustumLeftPlane (TPlane< T > &OuTPln) const |
| |
| bool | GetFrustumRightPlane (TPlane< T > &OuTPln) const |
| |
| bool | GetFrustumTopPlane (TPlane< T > &OuTPln) const |
| |
| bool | GetFrustumBottomPlane (TPlane< T > &OuTPln) const |
| |
| void | Mirror (EAxis::Type MirrorAxis, EAxis::Type FlipAxis) |
| |
| FString | ToString () const |
| |
| void | DebugPrint () const |
| |
| uint32 | ComputeHash () const |
| |
| bool | Serialize (FArchive &Ar) |
| |
| bool | SerializeFromMismatchedTag (FName StructTag, FArchive &Ar) |
| |
| template<typename FArg UE_REQUIRES> |
| | TMatrix (const TMatrix< FArg > &From) |
| |
| void | To3x4MatrixTranspose (float *Out) const |
| |
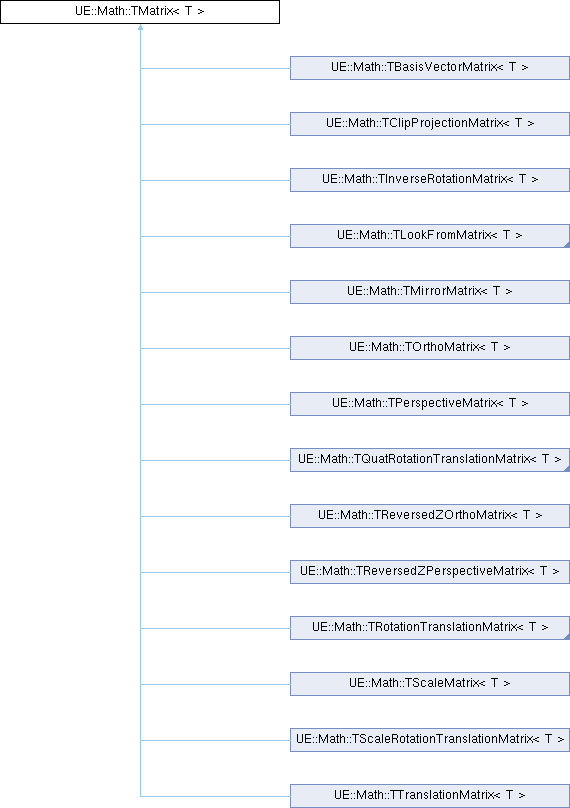
 Inheritance diagram for UE::Math::TMatrix< T >:
Inheritance diagram for UE::Math::TMatrix< T >: