|
| static ENGINE_API void | GetAttachedBodyNames (UPARAM(ref) FConstraintInstanceAccessor &Accessor, FName &ParentBody, FName &ChildBody) |
| |
| static ENGINE_API void | SetDisableCollision (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bDisableCollision) |
| |
| static ENGINE_API bool | GetDisableCollsion (UPARAM(ref) FConstraintInstanceAccessor &Accessor) |
| |
| static ENGINE_API void | SetProjectionParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableProjection, float ProjectionLinearAlpha, float ProjectionAngularAlpha) |
| |
| static ENGINE_API void | GetProjectionParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bEnableProjection, float &ProjectionLinearAlpha, float &ProjectionAngularAlpha) |
| |
| static ENGINE_API void | SetParentDominates (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bParentDominates) |
| |
| static ENGINE_API bool | GetParentDominates (UPARAM(ref) FConstraintInstanceAccessor &Accessor) |
| |
| static ENGINE_API void | SetMassConditioningEnabled (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableMassConditioning) |
| | Enable or disable mass conditioning for the constraint.
|
| |
| static ENGINE_API bool | GetMassConditioningEnabled (UPARAM(ref) FConstraintInstanceAccessor &Accessor) |
| | Gets whether mass conditioning is enabled for the constraint.
|
| |
| static ENGINE_API void | SetLinearLimits (UPARAM(ref) FConstraintInstanceAccessor &Accessor, TEnumAsByte< ELinearConstraintMotion > XMotion, TEnumAsByte< ELinearConstraintMotion > YMotion, TEnumAsByte< ELinearConstraintMotion > ZMotion, float Limit) |
| |
| static ENGINE_API void | GetLinearLimits (UPARAM(ref) FConstraintInstanceAccessor &Accessor, TEnumAsByte< ELinearConstraintMotion > &XMotion, TEnumAsByte< ELinearConstraintMotion > &YMotion, TEnumAsByte< ELinearConstraintMotion > &ZMotion, float &Limit) |
| |
| static ENGINE_API void | SetLinearSoftLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bSoftLinearLimit, float LinearLimitStiffness, float LinearLimitDamping, float LinearLimitRestitution, float LinearLimitContactDistance) |
| |
| static ENGINE_API void | GetLinearSoftLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bSoftLinearLimit, float &LinearLimitStiffness, float &LinearLimitDamping, float &LinearLimitRestitution, float &LinearLimitContactDistance) |
| |
| static ENGINE_API void | SetLinearBreakable (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bLinearBreakable, float LinearBreakThreshold) |
| |
| static ENGINE_API void | GetLinearBreakable (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bLinearBreakable, float &LinearBreakThreshold) |
| |
| static ENGINE_API void | SetLinearPlasticity (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bLinearPlasticity, float LinearPlasticityThreshold, TEnumAsByte< EConstraintPlasticityType > PlasticityType) |
| |
| static ENGINE_API void | GetLinearPlasticity (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bLinearPlasticity, float &LinearPlasticityThreshold, TEnumAsByte< EConstraintPlasticityType > &PlasticityType) |
| |
| static ENGINE_API void | GetContactTransferScale (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float &ContactTransferScale) |
| |
| static ENGINE_API void | SetContactTransferScale (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float ContactTransferScale) |
| |
| static ENGINE_API void | SetAngularLimits (UPARAM(ref) FConstraintInstanceAccessor &Accessor, TEnumAsByte< EAngularConstraintMotion > Swing1MotionType, float Swing1LimitAngle, TEnumAsByte< EAngularConstraintMotion > Swing2MotionType, float Swing2LimitAngle, TEnumAsByte< EAngularConstraintMotion > TwistMotionType, float TwistLimitAngle) |
| |
| static ENGINE_API void | GetAngularLimits (UPARAM(ref) FConstraintInstanceAccessor &Accessor, TEnumAsByte< EAngularConstraintMotion > &Swing1MotionType, float &Swing1LimitAngle, TEnumAsByte< EAngularConstraintMotion > &Swing2MotionType, float &Swing2LimitAngle, TEnumAsByte< EAngularConstraintMotion > &TwistMotionType, float &TwistLimitAngle) |
| |
| static ENGINE_API void | SetAngularSoftSwingLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bSoftSwingLimit, float SwingLimitStiffness, float SwingLimitDamping, float SwingLimitRestitution, float SwingLimitContactDistance) |
| |
| static ENGINE_API void | GetAngularSoftSwingLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bSoftSwingLimit, float &SwingLimitStiffness, float &SwingLimitDamping, float &SwingLimitRestitution, float &SwingLimitContactDistance) |
| |
| static ENGINE_API void | SetAngularSoftTwistLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bSoftTwistLimit, float TwistLimitStiffness, float TwistLimitDamping, float TwistLimitRestitution, float TwistLimitContactDistance) |
| |
| static ENGINE_API void | GetAngularSoftTwistLimitParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bSoftTwistLimit, float &TwistLimitStiffness, float &TwistLimitDamping, float &TwistLimitRestitution, float &TwistLimitContactDistance) |
| |
| static ENGINE_API void | SetAngularBreakable (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bAngularBreakable, float AngularBreakThreshold) |
| |
| static ENGINE_API void | GetAngularBreakable (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bAngularBreakable, float &AngularBreakThreshold) |
| |
| static ENGINE_API void | SetAngularPlasticity (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bAngularPlasticity, float AngularPlasticityThreshold) |
| |
| static ENGINE_API void | GetAngularPlasticity (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bAngularPlasticity, float &AngularPlasticityThreshold) |
| |
| static ENGINE_API void | SetLinearPositionDrive (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableDriveX, bool bEnableDriveY, bool bEnableDriveZ) |
| |
| static ENGINE_API void | GetLinearPositionDrive (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableDriveX, bool &bOutEnableDriveY, bool &bOutEnableDriveZ) |
| |
| static ENGINE_API void | SetLinearVelocityDrive (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableDriveX, bool bEnableDriveY, bool bEnableDriveZ) |
| |
| static ENGINE_API void | GetLinearVelocityDrive (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableDriveX, bool &bOutEnableDriveY, bool &bOutEnableDriveZ) |
| |
| static ENGINE_API void | SetLinearPositionTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, const FVector &InPosTarget) |
| |
| static ENGINE_API void | GetLinearPositionTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, FVector &OutPosTarget) |
| |
| static ENGINE_API void | SetLinearVelocityTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, const FVector &InVelTarget) |
| |
| static ENGINE_API void | GetLinearVelocityTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, FVector &OutVelTarget) |
| |
| static ENGINE_API void | SetLinearDriveParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float PositionStrength, float VelocityStrength, float InForceLimit) |
| |
| static ENGINE_API void | GetLinearDriveParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float &OutPositionStrength, float &OutVelocityStrength, float &OutForceLimit) |
| |
| static ENGINE_API void | SetOrientationDriveTwistAndSwing (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableTwistDrive, bool bEnableSwingDrive) |
| |
| static ENGINE_API void | GetOrientationDriveTwistAndSwing (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableTwistDrive, bool &bOutEnableSwingDrive) |
| |
| static ENGINE_API void | SetOrientationDriveSLERP (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableSLERP) |
| |
| static ENGINE_API void | GetOrientationDriveSLERP (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableSLERP) |
| |
| static ENGINE_API void | SetAngularVelocityDriveTwistAndSwing (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableTwistDrive, bool bEnableSwingDrive) |
| |
| static ENGINE_API void | GetAngularVelocityDriveTwistAndSwing (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableTwistDrive, bool &bOutEnableSwingDrive) |
| |
| static ENGINE_API void | SetAngularVelocityDriveSLERP (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool bEnableSLERP) |
| |
| static ENGINE_API void | GetAngularVelocityDriveSLERP (UPARAM(ref) FConstraintInstanceAccessor &Accessor, bool &bOutEnableSLERP) |
| |
| static ENGINE_API void | SetAngularDriveMode (UPARAM(ref) FConstraintInstanceAccessor &Accessor, EAngularDriveMode::Type DriveMode) |
| |
| static ENGINE_API void | GetAngularDriveMode (UPARAM(ref) FConstraintInstanceAccessor &Accessor, TEnumAsByte< EAngularDriveMode::Type > &OutDriveMode) |
| |
| static ENGINE_API void | SetAngularOrientationTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, const FRotator &InPosTarget) |
| |
| static ENGINE_API void | GetAngularOrientationTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, FRotator &OutPosTarget) |
| |
| static ENGINE_API void | SetAngularVelocityTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, const FVector &InVelTarget) |
| |
| static ENGINE_API void | GetAngularVelocityTarget (UPARAM(ref) FConstraintInstanceAccessor &Accessor, FVector &OutVelTarget) |
| |
| static ENGINE_API void | SetAngularDriveParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float PositionStrength, float VelocityStrength, float InForceLimit) |
| |
| static ENGINE_API void | GetAngularDriveParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, float &OutPositionStrength, float &OutVelocityStrength, float &OutForceLimit) |
| |
| static ENGINE_API void | CopyParams (UPARAM(ref) FConstraintInstanceAccessor &Accessor, UPARAM(ref) FConstraintInstanceAccessor &SourceAccessor, bool bKeepPosition=true, bool bKeepRotation=true) |
| |
| static COREUOBJECT_API void | UpdateClassesExcludedFromDedicatedServer (const TArray< FString > &InClassNames, const TArray< FString > &InModulesNames) |
| |
| static COREUOBJECT_API void | UpdateClassesExcludedFromDedicatedClient (const TArray< FString > &InClassNames, const TArray< FString > &InModulesNames) |
| |
| static COREUOBJECT_API bool | CanCreateInCurrentContext (UObject *Template) |
| |
| static COREUOBJECT_API void | AddReferencedObjects (UObject *InThis, FReferenceCollector &Collector) |
| |
| static COREUOBJECT_API const FName & | SourceFileTagName () |
| |
| static COREUOBJECT_API UObject * | GetArchetypeFromRequiredInfo (const UClass *Class, const UObject *Outer, FName Name, EObjectFlags ObjectFlags) |
| |
| static bool | IsGarbageEliminationEnabled () |
| |
| static bool | IsPendingKillEnabled () |
| |
| static void | SetGarbageEliminationEnabled (bool bEnabled) |
| |
| static COREUOBJECT_API void | ReloadObjectsFromModifiedConfigSections (const class FConfigModificationTracker *ChangeTracker) |
| |
| static COREUOBJECT_API FString | RemoveClassPrefix (const TCHAR *ClassName) |
| |
| static void | PrefetchClass (UObject *Object) |
| |
| static void | PrefetchOuter (UObject *Object) |
| |
|
| enum class | ENetFields_Private { NETFIELD_REP_START = 0
, NETFIELD_REP_END = -1
} |
| |
| typedef UObject | WithinClass |
| |
| COREUOBJECT_API | UObject () |
| |
| COREUOBJECT_API | UObject (const FObjectInitializer &ObjectInitializer) |
| |
| COREUOBJECT_API | UObject (EStaticConstructor, EObjectFlags InFlags) |
| |
| COREUOBJECT_API | UObject (FVTableHelper &Helper) |
| |
| COREUOBJECT_API UObject * | CreateDefaultSubobject (FName SubobjectFName, UClass *ReturnType, UClass *ClassToCreateByDefault, bool bIsRequired, bool bIsTransient) |
| |
| template<class TReturnType > |
| TReturnType * | CreateEditorOnlyDefaultSubobject (FName SubobjectName, bool bTransient=false) |
| |
| template<class TReturnType > |
| TReturnType * | CreateDefaultSubobject (FName SubobjectName, bool bTransient=false) |
| |
| template<class TReturnType , class TClassToConstructByDefault > |
| TReturnType * | CreateDefaultSubobject (FName SubobjectName, bool bTransient=false) |
| |
| template<class TReturnType > |
| TReturnType * | CreateOptionalDefaultSubobject (FName SubobjectName, bool bTransient=false) |
| |
| template<class TReturnType , class TClassToConstructByDefault > |
| TReturnType * | CreateOptionalDefaultSubobject (FName SubobjectName, bool bTransient=false) |
| |
| COREUOBJECT_API void | GetDefaultSubobjects (TArray< UObject * > &OutDefaultSubobjects) |
| |
| COREUOBJECT_API UObject * | GetDefaultSubobjectByName (FName ToFind) |
| |
| virtual COREUOBJECT_API void | PostInitProperties () |
| |
| virtual COREUOBJECT_API void | PostReinitProperties () |
| |
| virtual void | PostCDOContruct () |
| |
| virtual COREUOBJECT_API void | PreSaveRoot (FObjectPreSaveRootContext ObjectSaveContext) |
| |
| virtual COREUOBJECT_API void | PostSaveRoot (FObjectPostSaveRootContext ObjectSaveContext) |
| |
| virtual COREUOBJECT_API void | PreSave (FObjectPreSaveContext SaveContext) |
| |
| virtual COREUOBJECT_API void | CollectSaveOverrides (FObjectCollectSaveOverridesContext SaveContext) |
| |
| UE_FORCEINLINE_HINT bool | Modify (bool bAlwaysMarkDirty=true) |
| |
| UE_FORCEINLINE_HINT bool | IsCapturingAsRootObjectForTransaction () const |
| |
| virtual bool | ResolveSubobject (const TCHAR *SubObjectPath, UObject *&OutObject, bool bLoadIfExists) |
| |
| virtual bool | IsReadyForAsyncPostLoad () const |
| |
| virtual COREUOBJECT_API void | PostLoad () |
| |
| virtual COREUOBJECT_API void | PostLoadSubobjects (FObjectInstancingGraph *OuterInstanceGraph) |
| |
| virtual COREUOBJECT_API void | BeginDestroy () |
| |
| virtual bool | IsReadyForFinishDestroy () |
| |
| virtual COREUOBJECT_API void | FinishDestroy () |
| |
| virtual COREUOBJECT_API void | Serialize (FArchive &Ar) |
| |
| virtual COREUOBJECT_API void | Serialize (FStructuredArchive::FRecord Record) |
| |
| virtual void | ShutdownAfterError () |
| |
| virtual void | PostInterpChange (FProperty *PropertyThatChanged) |
| |
| virtual COREUOBJECT_API void | PostRename (UObject *OldOuter, const FName OldName) |
| |
| virtual void | PreDuplicate (FObjectDuplicationParameters &DupParams) |
| |
| virtual void | PostDuplicate (bool bDuplicateForPIE) |
| |
| virtual void | PostDuplicate (EDuplicateMode::Type DuplicateMode) |
| |
| virtual COREUOBJECT_API bool | NeedsLoadForClient () const |
| |
| virtual COREUOBJECT_API bool | NeedsLoadForServer () const |
| |
| virtual COREUOBJECT_API bool | NeedsLoadForTargetPlatform (const class ITargetPlatform *TargetPlatform) const |
| |
| virtual bool | NeedsLoadForEditorGame () const |
| |
| virtual bool | IsEditorOnly () const |
| |
| virtual bool | HasNonEditorOnlyReferences () const |
| |
| virtual bool | IsPostLoadThreadSafe () const |
| |
| virtual COREUOBJECT_API bool | IsDestructionThreadSafe () const |
| |
| virtual COREUOBJECT_API void | GetPreloadDependencies (TArray< UObject * > &OutDeps) |
| |
| virtual void | GetPrestreamPackages (TArray< UObject * > &OutPrestream) |
| |
| virtual void | ExportCustomProperties (FOutputDevice &Out, uint32 Indent) |
| |
| virtual void | ImportCustomProperties (const TCHAR *SourceText, FFeedbackContext *Warn) |
| |
| virtual void | PostEditImport () |
| |
| virtual void | PostReloadConfig (class FProperty *PropertyThatWasLoaded) |
| |
| virtual COREUOBJECT_API bool | Rename (const TCHAR *NewName=nullptr, UObject *NewOuter=nullptr, ERenameFlags Flags=REN_None) |
| |
| virtual FString | GetDesc () |
| |
| COREUOBJECT_API UScriptStruct * | GetSparseClassDataStruct () const |
| |
| virtual bool | GetNativePropertyValues (TMap< FString, FString > &out_PropertyValues, uint32 ExportFlags=0) const |
| |
| virtual COREUOBJECT_API void | GetResourceSizeEx (FResourceSizeEx &CumulativeResourceSize) |
| |
| SIZE_T | GetResourceSizeBytes (EResourceSizeMode::Type Mode) |
| |
| virtual FName | GetExporterName (void) |
| |
| COREUOBJECT_API void | CallAddReferencedObjects (FReferenceCollector &Collector) |
| |
| virtual FRestoreForUObjectOverwrite * | GetRestoreForUObjectOverwrite () |
| |
| virtual bool | AreNativePropertiesIdenticalTo (UObject *Other) const |
| |
| virtual COREUOBJECT_API void | GetAssetRegistryTags (FAssetRegistryTagsContext Context) const |
| |
| virtual COREUOBJECT_API void | GetAssetRegistryTags (TArray< FAssetRegistryTag > &OutTags) const |
| |
| COREUOBJECT_API void | GetAssetRegistryTags (FAssetData &Out) const |
| |
| COREUOBJECT_API void | GetAssetRegistryTags (FAssetRegistryTagsContext Context, FAssetData &Out) const |
| |
| virtual COREUOBJECT_API bool | IsAsset () const |
| |
| virtual COREUOBJECT_API FPrimaryAssetId | GetPrimaryAssetId () const |
| |
| virtual COREUOBJECT_API bool | IsLocalizedResource () const |
| |
| virtual COREUOBJECT_API bool | IsSafeForRootSet () const |
| |
| virtual COREUOBJECT_API void | TagSubobjects (EObjectFlags NewFlags) |
| |
| virtual COREUOBJECT_API void | GetLifetimeReplicatedProps (TArray< class FLifetimeProperty > &OutLifetimeProps) const |
| |
| virtual COREUOBJECT_API void | GetReplicatedCustomConditionState (FCustomPropertyConditionState &OutActiveState) const |
| |
| virtual COREUOBJECT_API void | RegisterReplicationFragments (UE::Net::FFragmentRegistrationContext &Context, UE::Net::EFragmentRegistrationFlags RegistrationFlags) |
| |
| virtual COREUOBJECT_API bool | IsNameStableForNetworking () const |
| |
| virtual COREUOBJECT_API bool | IsFullNameStableForNetworking () const |
| |
| virtual COREUOBJECT_API bool | IsSupportedForNetworking () const |
| |
| virtual void | GetSubobjectsWithStableNamesForNetworking (TArray< UObject * > &ObjList) |
| |
| virtual COREUOBJECT_API void | PreNetReceive () |
| |
| virtual COREUOBJECT_API void | PostNetReceive () |
| |
| virtual void | PostRepNotifies () |
| |
| virtual COREUOBJECT_API void | PreDestroyFromReplication () |
| |
| COREUOBJECT_API bool | IsSelected () const |
| |
| COREUOBJECT_API void | SerializeScriptProperties (FArchive &Ar) const |
| |
| COREUOBJECT_API void | SerializeScriptProperties (FStructuredArchive::FSlot Slot) const |
| |
| COREUOBJECT_API void | ReinitializeProperties (UObject *SourceObject=NULL, struct FObjectInstancingGraph *InstanceGraph=NULL) |
| |
| COREUOBJECT_API FString | GetDetailedInfo () const |
| |
| COREUOBJECT_API bool | ConditionalBeginDestroy () |
| |
| COREUOBJECT_API bool | ConditionalFinishDestroy () |
| |
| COREUOBJECT_API void | ConditionalPostLoad () |
| |
| COREUOBJECT_API void | ConditionalPreload () |
| |
| COREUOBJECT_API void | ConditionalPostLoadSubobjects (struct FObjectInstancingGraph *OuterInstanceGraph=NULL) |
| |
| bool | IsBasedOnArchetype (const UObject *const SomeObject) const |
| |
| COREUOBJECT_API UFunction * | FindFunction (FName InName) const |
| |
| COREUOBJECT_API UFunction * | FindFunctionChecked (FName InName) const |
| |
| virtual COREUOBJECT_API void | BuildSubobjectMapping (UObject *OtherObject, TMap< UObject *, UObject * > &ObjectMapping) const |
| |
| COREUOBJECT_API void | CollectDefaultSubobjects (TArray< UObject * > &OutDefaultSubobjects, bool bIncludeNestedSubobjects=false) const |
| |
| COREUOBJECT_API bool | CheckDefaultSubobjects (bool bForceCheck=false) const |
| |
| COREUOBJECT_API void | SaveConfig (uint64 RequiredPropertyFlags=CPF_Config, const TCHAR *Filename=nullptr, FConfigCacheIni *Config=GConfig, bool bAllowCopyToDefaultObject=true) |
| |
| COREUOBJECT_API void | SaveConfig (const FSaveConfigContext &Context) |
| |
| COREUOBJECT_API void | UpdateDefaultConfigFile (const FString &SpecificFileLocation="") |
| |
| COREUOBJECT_API bool | TryUpdateDefaultConfigFile (const FString &SpecificFileLocation="", bool bWarnIfFail=true) |
| |
| COREUOBJECT_API void | UpdateGlobalUserConfigFile () |
| |
| COREUOBJECT_API void | UpdateProjectUserConfigFile () |
| |
| COREUOBJECT_API void | UpdateSinglePropertyInConfigFile (const FProperty *InProperty, const FString &InConfigIniName) |
| |
| COREUOBJECT_API FString | GetDefaultConfigFilename () const |
| |
| COREUOBJECT_API FString | GetGlobalUserConfigFilename () const |
| |
| COREUOBJECT_API FString | GetProjectUserConfigFilename () const |
| |
| virtual const TCHAR * | GetConfigOverridePlatform () const |
| |
| virtual void | OverrideConfigSection (FString &SectionName) |
| |
| virtual void | OverridePerObjectConfigSection (FString &SectionName) |
| |
| COREUOBJECT_API void | LoadConfig (UClass *ConfigClass=nullptr, const TCHAR *Filename=nullptr, uint32 PropagationFlags=UE::LCPF_None, class FProperty *PropertyToLoad=nullptr, TArray< UE::ConfigAccessTracking::FConfigAccessData > *OutAccessedKeys=nullptr) |
| |
| COREUOBJECT_API void | ReloadConfig (UClass *ConfigClass=NULL, const TCHAR *Filename=NULL, uint32 PropagationFlags=UE::LCPF_None, class FProperty *PropertyToLoad=NULL) |
| |
| COREUOBJECT_API void | ParseParms (const TCHAR *Parms) |
| |
| COREUOBJECT_API void | OutputReferencers (FOutputDevice &Ar, FReferencerInformationList *Referencers=NULL) |
| |
| COREUOBJECT_API void | RetrieveReferencers (TArray< FReferencerInformation > *OutInternalReferencers, TArray< FReferencerInformation > *OutExternalReferencers) |
| |
| COREUOBJECT_API void | SetLinker (FLinkerLoad *LinkerLoad, int32 LinkerIndex, bool bShouldDetachExisting=true, bool bSilenceLogs=false) |
| |
| COREUOBJECT_API UObject * | GetArchetype () const |
| |
| COREUOBJECT_API void | GetArchetypeInstances (TArray< UObject * > &Instances) |
| |
| COREUOBJECT_API void | InstanceSubobjectTemplates (struct FObjectInstancingGraph *InstanceGraph=NULL) |
| |
| template<class T > |
| bool | Implements () const |
| |
| virtual COREUOBJECT_API void | ProcessEvent (UFunction *Function, void *Parms) |
| |
| virtual bool | CallRemoteFunction (UFunction *Function, void *Parms, struct FOutParmRec *OutParms, FFrame *Stack) |
| |
| COREUOBJECT_API bool | CallFunctionByNameWithArguments (const TCHAR *Cmd, FOutputDevice &Ar, UObject *Executor, bool bForceCallWithNonExec=false) |
| |
| COREUOBJECT_API void | CallFunction (FFrame &Stack, RESULT_DECL, UFunction *Function) |
| |
| | DECLARE_FUNCTION (ProcessInternal) |
| |
| virtual bool | ProcessConsoleExec (const TCHAR *Cmd, FOutputDevice &Ar, UObject *Executor) |
| |
| COREUOBJECT_API void | SkipFunction (FFrame &Stack, RESULT_DECL, UFunction *Function) |
| |
| virtual UClass * | RegenerateClass (UClass *ClassToRegenerate, UObject *PreviousCDO) |
| |
| COREUOBJECT_API bool | IsInBlueprint () const |
| |
| COREUOBJECT_API void | DestroyNonNativeProperties () |
| |
| virtual void | MarkAsEditorOnlySubobject () |
| |
| COREUOBJECT_API void | AbortInsideMemberFunction () const |
| |
| | DECLARE_FUNCTION (execUndefined) |
| |
| | DECLARE_FUNCTION (execLocalVariable) |
| |
| | DECLARE_FUNCTION (execInstanceVariable) |
| |
| | DECLARE_FUNCTION (execDefaultVariable) |
| |
| | DECLARE_FUNCTION (execLocalOutVariable) |
| |
| | DECLARE_FUNCTION (execInterfaceVariable) |
| |
| | DECLARE_FUNCTION (execClassSparseDataVariable) |
| |
| | DECLARE_FUNCTION (execInterfaceContext) |
| |
| | DECLARE_FUNCTION (execArrayElement) |
| |
| | DECLARE_FUNCTION (execBoolVariable) |
| |
| | DECLARE_FUNCTION (execClassDefaultVariable) |
| |
| | DECLARE_FUNCTION (execEndFunctionParms) |
| |
| | DECLARE_FUNCTION (execNothing) |
| |
| | DECLARE_FUNCTION (execNothingInt32) |
| |
| | DECLARE_FUNCTION (execNothingOp4a) |
| |
| | DECLARE_FUNCTION (execBreakpoint) |
| |
| | DECLARE_FUNCTION (execTracepoint) |
| |
| | DECLARE_FUNCTION (execWireTracepoint) |
| |
| | DECLARE_FUNCTION (execInstrumentation) |
| |
| | DECLARE_FUNCTION (execEndOfScript) |
| |
| | DECLARE_FUNCTION (execReturnNothing) |
| |
| | DECLARE_FUNCTION (execEmptyParmValue) |
| |
| | DECLARE_FUNCTION (execJump) |
| |
| | DECLARE_FUNCTION (execJumpIfNot) |
| |
| | DECLARE_FUNCTION (execAssert) |
| |
| | DECLARE_FUNCTION (execPushExecutionFlow) |
| |
| | DECLARE_FUNCTION (execPopExecutionFlow) |
| |
| | DECLARE_FUNCTION (execComputedJump) |
| |
| | DECLARE_FUNCTION (execPopExecutionFlowIfNot) |
| |
| | DECLARE_FUNCTION (execLet) |
| |
| | DECLARE_FUNCTION (execLetObj) |
| |
| | DECLARE_FUNCTION (execLetWeakObjPtr) |
| |
| | DECLARE_FUNCTION (execLetBool) |
| |
| | DECLARE_FUNCTION (execLetDelegate) |
| |
| | DECLARE_FUNCTION (execLetMulticastDelegate) |
| |
| | DECLARE_FUNCTION (execAddMulticastDelegate) |
| |
| | DECLARE_FUNCTION (execClearMulticastDelegate) |
| |
| | DECLARE_FUNCTION (execEatReturnValue) |
| |
| | DECLARE_FUNCTION (execRemoveMulticastDelegate) |
| |
| | DECLARE_FUNCTION (execSelf) |
| |
| | DECLARE_FUNCTION (execContext) |
| |
| | DECLARE_FUNCTION (execContext_FailSilent) |
| |
| | DECLARE_FUNCTION (execStructMemberContext) |
| |
| | DECLARE_FUNCTION (execVirtualFunction) |
| |
| | DECLARE_FUNCTION (execFinalFunction) |
| |
| | DECLARE_FUNCTION (execLocalVirtualFunction) |
| |
| | DECLARE_FUNCTION (execLocalFinalFunction) |
| |
| | DECLARE_FUNCTION (execStructCmpEq) |
| |
| | DECLARE_FUNCTION (execStructCmpNe) |
| |
| | DECLARE_FUNCTION (execStructMember) |
| |
| | DECLARE_FUNCTION (execEqualEqual_DelegateDelegate) |
| |
| | DECLARE_FUNCTION (execNotEqual_DelegateDelegate) |
| |
| | DECLARE_FUNCTION (execEqualEqual_DelegateFunction) |
| |
| | DECLARE_FUNCTION (execNotEqual_DelegateFunction) |
| |
| | DECLARE_FUNCTION (execIntConst) |
| |
| | DECLARE_FUNCTION (execInt64Const) |
| |
| | DECLARE_FUNCTION (execUInt64Const) |
| |
| | DECLARE_FUNCTION (execSkipOffsetConst) |
| |
| | DECLARE_FUNCTION (execFloatConst) |
| |
| | DECLARE_FUNCTION (execDoubleConst) |
| |
| | DECLARE_FUNCTION (execStringConst) |
| |
| | DECLARE_FUNCTION (execUnicodeStringConst) |
| |
| | DECLARE_FUNCTION (execTextConst) |
| |
| | DECLARE_FUNCTION (execPropertyConst) |
| |
| | DECLARE_FUNCTION (execObjectConst) |
| |
| | DECLARE_FUNCTION (execSoftObjectConst) |
| |
| | DECLARE_FUNCTION (execFieldPathConst) |
| |
| | DECLARE_FUNCTION (execInstanceDelegate) |
| |
| | DECLARE_FUNCTION (execNameConst) |
| |
| | DECLARE_FUNCTION (execByteConst) |
| |
| | DECLARE_FUNCTION (execIntZero) |
| |
| | DECLARE_FUNCTION (execIntOne) |
| |
| | DECLARE_FUNCTION (execTrue) |
| |
| | DECLARE_FUNCTION (execFalse) |
| |
| | DECLARE_FUNCTION (execNoObject) |
| |
| | DECLARE_FUNCTION (execNullInterface) |
| |
| | DECLARE_FUNCTION (execIntConstByte) |
| |
| | DECLARE_FUNCTION (execRotationConst) |
| |
| | DECLARE_FUNCTION (execVectorConst) |
| |
| | DECLARE_FUNCTION (execVector3fConst) |
| |
| | DECLARE_FUNCTION (execTransformConst) |
| |
| | DECLARE_FUNCTION (execStructConst) |
| |
| | DECLARE_FUNCTION (execSetArray) |
| |
| | DECLARE_FUNCTION (execSetSet) |
| |
| | DECLARE_FUNCTION (execSetMap) |
| |
| | DECLARE_FUNCTION (execArrayConst) |
| |
| | DECLARE_FUNCTION (execSetConst) |
| |
| | DECLARE_FUNCTION (execMapConst) |
| |
| | DECLARE_FUNCTION (execBitFieldConst) |
| |
| | DECLARE_FUNCTION (execNew) |
| |
| | DECLARE_FUNCTION (execClassContext) |
| |
| | DECLARE_FUNCTION (execNativeParm) |
| |
| | DECLARE_FUNCTION (execCast) |
| |
| | DECLARE_FUNCTION (execDynamicCast) |
| |
| | DECLARE_FUNCTION (execMetaCast) |
| |
| | DECLARE_FUNCTION (execInterfaceCast) |
| |
| | DECLARE_FUNCTION (execDoubleToFloatCast) |
| |
| | DECLARE_FUNCTION (execFloatToDoubleCast) |
| |
| | DECLARE_FUNCTION (execObjectToBool) |
| |
| | DECLARE_FUNCTION (execInterfaceToBool) |
| |
| | DECLARE_FUNCTION (execObjectToInterface) |
| |
| | DECLARE_FUNCTION (execInterfaceToInterface) |
| |
| | DECLARE_FUNCTION (execInterfaceToObject) |
| |
| | DECLARE_FUNCTION (execGetDynArrayElement) |
| |
| | DECLARE_FUNCTION (execSetDynArrayElement) |
| |
| | DECLARE_FUNCTION (execGetDynArrayLength) |
| |
| | DECLARE_FUNCTION (execSetDynArrayLength) |
| |
| | DECLARE_FUNCTION (execDynArrayInsert) |
| |
| | DECLARE_FUNCTION (execDynArrayRemove) |
| |
| | DECLARE_FUNCTION (execDynArrayFind) |
| |
| | DECLARE_FUNCTION (execDynArrayFindStruct) |
| |
| | DECLARE_FUNCTION (execDynArrayAdd) |
| |
| | DECLARE_FUNCTION (execDynArrayAddItem) |
| |
| | DECLARE_FUNCTION (execDynArrayInsertItem) |
| |
| | DECLARE_FUNCTION (execDynArrayRemoveItem) |
| |
| | DECLARE_FUNCTION (execDynArraySort) |
| |
| | DECLARE_FUNCTION (execBindDelegate) |
| |
| | DECLARE_FUNCTION (execCallMulticastDelegate) |
| |
| | DECLARE_FUNCTION (execLetValueOnPersistentFrame) |
| |
| | DECLARE_FUNCTION (execCallMathFunction) |
| |
| | DECLARE_FUNCTION (execSwitchValue) |
| |
| | DECLARE_FUNCTION (execArrayGetByRef) |
| |
| | DECLARE_FUNCTION (execAutoRtfmTransact) |
| |
| | DECLARE_FUNCTION (execAutoRtfmStopTransact) |
| |
| | DECLARE_FUNCTION (execAutoRtfmAbortIfNot) |
| |
| void | ExecuteUbergraph (int32 EntryPoint) |
| |
| virtual void | ValidateGeneratedRepEnums (const TArray< struct FRepRecord > &ClassReps) const |
| |
| virtual uint64 | GetNetPushIdDynamic () const |
| |
| | UObjectBaseUtility () |
| |
| | UObjectBaseUtility (EObjectFlags InFlags) |
| |
| void | SetFlags (EObjectFlags NewFlags) |
| |
| void | ClearFlags (EObjectFlags FlagsToClear) |
| |
| bool | HasAnyFlags (EObjectFlags FlagsToCheck) const |
| |
| bool | HasAllFlags (EObjectFlags FlagsToCheck) const |
| |
| UE_FORCEINLINE_HINT EObjectFlags | GetMaskedFlags (EObjectFlags Mask=RF_AllFlags) const |
| |
| UE_FORCEINLINE_HINT void | Mark (EObjectMark Marks) const |
| |
| UE_FORCEINLINE_HINT void | UnMark (EObjectMark Marks) const |
| |
| UE_FORCEINLINE_HINT bool | HasAnyMarks (EObjectMark Marks) const |
| |
| UE_FORCEINLINE_HINT bool | HasAllMarks (EObjectMark Marks) const |
| |
| UE_FORCEINLINE_HINT EObjectMark | GetAllMarks () const |
| |
| void | MarkAsGarbage () |
| |
| void | ClearGarbage () |
| |
| UE_FORCEINLINE_HINT void | AddToRoot () |
| |
| UE_FORCEINLINE_HINT void | RemoveFromRoot () |
| |
| UE_FORCEINLINE_HINT bool | IsRooted () const |
| |
| UE_FORCEINLINE_HINT int32 | GetRefCount () const |
| |
| bool | ThisThreadAtomicallyClearedRFUnreachable () |
| |
| UE_FORCEINLINE_HINT bool | IsUnreachable () const |
| |
| UE_FORCEINLINE_HINT bool | IsNative () const |
| |
| void | SetInternalFlags (EInternalObjectFlags FlagsToSet) const |
| |
| UE_FORCEINLINE_HINT EInternalObjectFlags | GetInternalFlags () const |
| |
| UE_FORCEINLINE_HINT bool | HasAnyInternalFlags (EInternalObjectFlags FlagsToCheck) const |
| |
| void | ClearInternalFlags (EInternalObjectFlags FlagsToClear) const |
| |
| bool | AtomicallyClearInternalFlags (EInternalObjectFlags FlagsToClear) const |
| |
| COREUOBJECT_API FString | GetFullName (const UObject *StopOuter=NULL, EObjectFullNameFlags Flags=EObjectFullNameFlags::None) const |
| |
| COREUOBJECT_API void | GetFullName (const UObject *StopOuter, FString &ResultString, EObjectFullNameFlags Flags=EObjectFullNameFlags::None) const |
| |
| COREUOBJECT_API void | GetFullName (FStringBuilderBase &ResultString, const UObject *StopOuter=NULL, EObjectFullNameFlags Flags=EObjectFullNameFlags::None) const |
| |
| COREUOBJECT_API FString | GetPathName (const UObject *StopOuter=NULL) const |
| |
| COREUOBJECT_API void | GetPathName (const UObject *StopOuter, FString &ResultString) const |
| |
| COREUOBJECT_API void | GetPathName (const UObject *StopOuter, FStringBuilderBase &ResultString) const |
| |
| virtual bool | CanBeClusterRoot () const |
| |
| virtual COREUOBJECT_API bool | CanBeInCluster () const |
| |
| virtual COREUOBJECT_API void | CreateCluster () |
| |
| virtual void | OnClusterMarkedAsPendingKill () |
| |
| COREUOBJECT_API void | AddToCluster (UObjectBaseUtility *ClusterRootOrObjectFromCluster, bool bAddAsMutableObject=false) |
| |
| COREUOBJECT_API FString | GetFullGroupName (bool bStartWithOuter) const |
| |
| UE_FORCEINLINE_HINT FString | GetName () const |
| |
| UE_FORCEINLINE_HINT void | GetName (FString &ResultString) const |
| |
| UE_FORCEINLINE_HINT void | AppendName (FString &ResultString) const |
| |
| COREUOBJECT_API bool | IsPackageExternal () const |
| |
| COREUOBJECT_API void | DetachExternalPackage () |
| |
| COREUOBJECT_API void | ReattachExternalPackage () |
| |
| COREUOBJECT_API UObject * | GetOutermostObject () const |
| |
| COREUOBJECT_API UPackage * | GetPackage () const |
| |
| UE_INTERNAL virtual COREUOBJECT_API UE::Core::FVersePath | GetVersePath () const |
| |
| COREUOBJECT_API UPackage * | GetOutermost () const |
| |
| COREUOBJECT_API bool | MarkPackageDirty () const |
| |
| COREUOBJECT_API bool | IsTemplate (EObjectFlags TemplateTypes=RF_ArchetypeObject|RF_ClassDefaultObject) const |
| |
| COREUOBJECT_API UObject * | GetTypedOuter (UClass *Target) const |
| |
| template<typename T > |
| T * | GetTypedOuter () const |
| |
| template<typename InterfaceClassType > |
| InterfaceClassType * | GetImplementingOuter () const |
| |
| COREUOBJECT_API UObjectBaseUtility * | GetImplementingOuterObject (const UClass *InInterfaceClass) const |
| |
| COREUOBJECT_API bool | IsIn (const UObject *SomeOuter) const |
| |
| COREUOBJECT_API bool | IsIn (const UPackage *SomePackage) const |
| |
| COREUOBJECT_API bool | IsInOuter (const UObject *SomeOuter) const |
| |
| COREUOBJECT_API bool | IsInPackage (const UPackage *SomePackage) const |
| |
| COREUOBJECT_API bool | IsInA (const UClass *SomeBaseClass) const |
| |
| COREUOBJECT_API bool | RootPackageHasAnyFlags (uint32 CheckFlagMask) const |
| |
| template<typename OtherClassType > |
| bool | IsA (OtherClassType SomeBase) const |
| |
| template<class T > |
| bool | IsA () const |
| |
| COREUOBJECT_API const UClass * | FindNearestCommonBaseClass (const UClass *TestClass) const |
| |
| COREUOBJECT_API void * | GetInterfaceAddress (UClass *InterfaceClass) |
| |
| COREUOBJECT_API void * | GetNativeInterfaceAddress (UClass *InterfaceClass) |
| |
| const void * | GetNativeInterfaceAddress (UClass *InterfaceClass) const |
| |
| COREUOBJECT_API bool | IsTemplateForSubobjects (EObjectFlags TemplateTypes=RF_ClassDefaultObject|RF_DefaultSubObject|RF_InheritableComponentTemplate) const |
| |
| COREUOBJECT_API bool | IsDefaultSubobject () const |
| |
| COREUOBJECT_API class FLinkerLoad * | GetLinker () const |
| |
| COREUOBJECT_API int32 | GetLinkerIndex () const |
| |
| COREUOBJECT_API FPackageFileVersion | GetLinkerUEVersion () const |
| |
| int32 | GetLinkerUE4Version () const |
| |
| COREUOBJECT_API int32 | GetLinkerLicenseeUEVersion () const |
| |
| int32 | GetLinkerLicenseeUE4Version () const |
| |
| COREUOBJECT_API int32 | GetLinkerCustomVersion (FGuid CustomVersionKey) const |
| |
| UE_FORCEINLINE_HINT bool | operator< (const UObjectBaseUtility &Other) const |
| |
| TStatId | GetStatID (bool bForDeferredUse=false) const |
| |
| COREUOBJECT_API | UObjectBase (UClass *InClass, EObjectFlags InFlags, EInternalObjectFlags InInternalFlags, UObject *InOuter, FName InName, int32 InInternalIndex=-1, int32 InSerialNumber=0, FRemoteObjectId InRemoteId=FRemoteObjectId()) |
| |
| virtual COREUOBJECT_API | ~UObjectBase () |
| |
| COREUOBJECT_API bool | IsValidLowLevel () const |
| |
| COREUOBJECT_API bool | IsValidLowLevelFast (bool bRecursive=true) const |
| |
| FORCEINLINE uint32 | GetUniqueID () const |
| |
| FORCEINLINE UClass * | GetClass () const |
| |
| FORCEINLINE UObject * | GetOuter () const |
| |
| FORCEINLINE FName | GetFName () const |
| |
| virtual COREUOBJECT_API FName | GetFNameForStatID () const |
| |
| COREUOBJECT_API UPackage * | GetExternalPackage () const |
| |
| COREUOBJECT_API void | SetExternalPackage (UPackage *InPackage) |
| |
| COREUOBJECT_API UPackage * | GetExternalPackageInternal () const |
| |
| COREUOBJECT_API void | MarkAsReachable () const |
| |
| COREUOBJECT_API void | AddRef () const |
| |
| COREUOBJECT_API void | ReleaseRef () const |
| |
| FORCEINLINE EObjectFlags | GetFlags () const |
| |
| FORCENOINLINE void | AtomicallySetFlags (EObjectFlags FlagsToAdd) |
| |
| FORCENOINLINE void | AtomicallyClearFlags (EObjectFlags FlagsToClear) |
| |
| virtual FString | GetDetailedInfoInternal () const |
| |
| COREUOBJECT_API bool | CanCheckDefaultSubObjects (bool bForceCheck, bool &bResult) const |
| |
| virtual COREUOBJECT_API bool | CheckDefaultSubobjectsInternal () const |
| |
| | UObjectBase () |
| |
| COREUOBJECT_API | UObjectBase (EObjectFlags InFlags) |
| |
| COREUOBJECT_API void | LowLevelRename (FName NewName, UObject *NewOuter=NULL) |
| |
| virtual void | RegisterDependencies () |
| |
| COREUOBJECT_API void | Register (class UClass *(*StaticClassFn)(), const TCHAR *PackageName, const TCHAR *Name) |
| |
| COREUOBJECT_API void | Register (const TCHAR *PackageName, const TCHAR *Name) |
| |
| virtual COREUOBJECT_API void | DeferredRegister (UClass *UClassStaticClass, const TCHAR *PackageName, const TCHAR *Name) |
| |
| FORCEINLINE void | SetFlagsTo (EObjectFlags NewFlags) |
| |
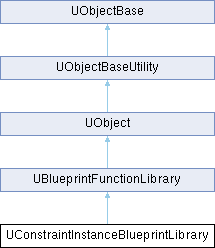
 Inheritance diagram for UConstraintInstanceBlueprintLibrary:
Inheritance diagram for UConstraintInstanceBlueprintLibrary: